Scenario, Situation, and Requirements Coverage – Illustrated through Parking Scenarios
Abstract:
In the pursuit of developing safe and reliable autonomous vehicles (AVs), engineers and researchers employ rigorous testing methodologies to ensure these vehicles can navigate real-world environments effectively. Among these methodologies, three critical approaches stand out: Scenario coverage involves subjecting AV systems to a diverse array of predefined simulated scenarios that mimic real-world driving conditions, including various traffic patterns, weather conditions, road types, and planned events; Situation coverage focuses on evaluating an AV system’s capability to handle dynamic and unpredictable events on the road, testing the vehicle’s response to unexpected situations, edge cases, and complex interactions with other road users and environmental elements; Requirements coverage verifies that the AV system meets specified functional and safety requirements outlined by developers, regulators, and industry standards, ensuring thorough testing and validation of every requirement. Each method plays a distinct yet interconnected role in evaluating the capabilities and readiness of AV systems. To elucidate these concepts, in this blog let’s delve into each aspect, using the common example of car parking in a parking space.
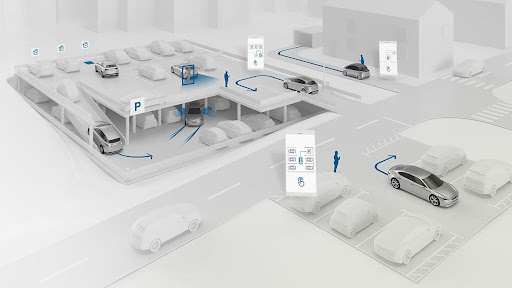
1. Car parking scenarios with different situations.
Types of Coverages at a parking space:
Scenario Coverage:
Scenario coverage entails subjecting AV systems to a plethora of predefined simulated scenarios that emulate diverse real-world driving conditions. This method emphasizes the creation of an extensive range of scenarios, including variations in traffic patterns, weather conditions, road types, and planned events. For instance, simulating scenarios such as highway merges, urban intersections, adverse weather conditions, and navigating through construction zones helps evaluate the vehicle’s responses and decision-making in different environments. In the context of car parking, scenario coverage may involve testing the vehicle’s ability to navigate crowded parking lots, parallel park in tight spaces, and handle varying lighting conditions within parking structures.
Situation Coverage:
On the other hand, situation coverage focuses on assessing an AV system’s capability to handle dynamic and unpredictable events that may arise on the road. This method involves testing the vehicle’s response to unexpected situations, edge cases, and complex interactions with other road users and environmental elements. For instance, evaluating the system’s reaction to sudden lane changes by other vehicles, navigating around pedestrians or obstacles, and adapting to unforeseen road closures constitutes situation coverage. In the context of car parking, situation coverage may involve testing the vehicle’s response to pedestrians unexpectedly crossing its path, vehicles abruptly reversing out of parking spaces, or navigating through temporary road obstructions within parking spaces.
Requirements Coverage:
Lastly, requirements coverage focuses on verifying that the AV system meets the specified functional and safety requirements outlined by developers, regulators, and industry standards. This method ensures that every requirement, from system functionality to safety measures, undergoes thorough testing and validation. For instance, verifying that the AV system adheres to requirements related to lane-keeping, speed control, emergency braking, and sensor accuracy ensures compliance with development guidelines. In the context of car parking, requirements coverage may involve validating that the vehicle’s parking maneuvers align with safety regulations, such as maintaining a safe distance from obstacles and pedestrians and adhering to speed limits within parking spaces.
Key Differences of Scenario Coverage vs. Situation Coverage vs. Requirements Coverage:
Scenario coverage primarily concentrates on creating diverse predefined scenarios, while situation coverage focuses on handling dynamic and unpredictable events. The nature of testing for scenario coverage involves testing planned scenarios representing specific driving conditions, whereas situation coverage deals with unexpected and dynamic events challenging the system’s adaptability. Now requirement validation for scenarios may align with requirements in scenario coverage, situation coverage aims to validate the system’s ability to meet requirements by assessing its response to dynamic situations. Comprehensive Testing in scenario coverage ensures a broad range of scenarios are simulated for testing, contributing to overall system robustness, whereas situation coverage focuses on testing adaptability and resilience to unexpected challenges. Lastly Alignment with Development Goals, the requirements coverage directly aligns with specific functional, safety, and performance goals set during the development process.
Techniques for Maximizing Coverage:
Maximizing coverage is paramount in testing and validating AV systems, especially in scenarios like car parking within parking spaces. Through comprehensive coverage, developers ensure that the vehicles can effectively handle diverse real-world situations, thus enhancing safety and reliability. Employing various techniques can help maximize coverage across scenarios, situations, and requirements.
Scenario Coverage:
Scenario Generation
In car parking, scenario generation plays a pivotal role in evaluating an AV’s capabilities to navigate parking areas efficiently and safely. Automation tools can simulate a myriad of parking scenarios, from parallel parking in narrow spaces to maneuvering through crowded parking lots. Randomization in scenario generation adds variability, ensuring that the AV system can adapt to unexpected obstacles or changes in the parking environment.
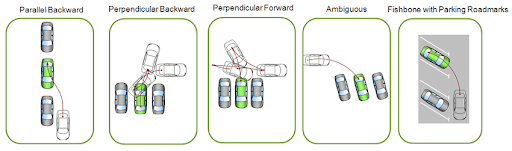
Car parking scenario with different types of parking.
Situation Coverage
- Risk-Based Testing: Identifying critical parking scenarios, such as navigating through busy parking lots or avoiding collisions with pedestrians, allows developers to prioritize testing efforts effectively. Probability and impact analyses further guide decision-making, ensuring that resources are allocated to test high-risk situations comprehensively, thus minimizing potential safety hazards related to parking.
- Equivalence Partitioning: Equivalence partitioning facilitates systematic testing of parking-related functionalities by dividing the input space into distinct classes. Testing scenarios at the boundaries of input ranges ensure that the AV system behaves reliably under various parking conditions, such as different parking space dimensions or environmental factors.
- Combinatorial Testing: Combinatorial testing techniques like pairwise testing enable efficient coverage of input parameter combinations relevant to parking scenarios. By testing different combinations of parking space dimensions, vehicle speeds, and environmental conditions, developers ensure that the AV system’s performance remains robust across a wide range of parking situations.

Image depicting a high-risk parking scenario, such as navigating through a crowded parking lot with pedestrians and obstacles.
Requirements Coverage
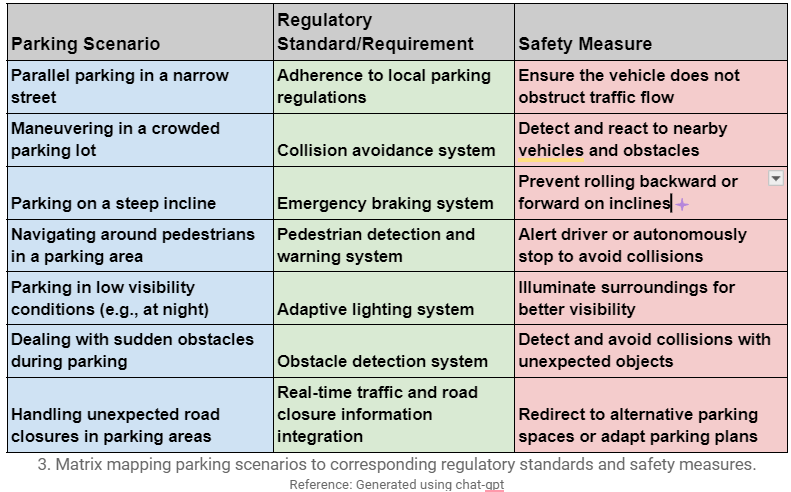
- Requirements Traceability: For AVs, meeting specified functional and safety requirements is imperative, especially concerning parking maneuvers. By mapping parking scenarios to specific requirements related to obstacle detection, collision avoidance, and adherence to parking regulations, developers ensure that every aspect of the AV system’s functionality is thoroughly tested and validated.
By combining these techniques, and testing we can maximize coverage, identify potential issues, and ensure the robustness and reliability of systems in AVs.
In summary, while scenario coverage and situation coverage both contribute to the validation of autonomous systems, they differ in their scenarios being predefined driving conditions and situations being dynamic and unpredictable events. Requirements coverage, on the other hand, ensures that the autonomous system meets the specified criteria and guidelines set by developers and regulators. Together, these approaches contribute to the comprehensive testing and validation of Autonomous Vehicles.
If you’re eager to explore the exciting frontiers of Automotive Cybersecurity and Functional Safety in Automotive and more about our groundbreaking initiatives in ADAS, reach out to us!
Author


 Embedded Software
Embedded Software Digital Twins & Simulation
Digital Twins & Simulation Software-Driven Verification (PSS)
Software-Driven Verification (PSS) Connectivity & Protocols
Connectivity & Protocols Functional Safety & Cybersecurity
Functional Safety & Cybersecurity ADAS & Autonomous Vehicle V&V
ADAS & Autonomous Vehicle V&V GenAI/LLM
GenAI/LLM